Using GPS/GNSS reflections for soil moisture and sea state monitoring
1. Introduction
The technique under consideration is based on a concept of using Global Positioning System (GPS) signals as signals of opportunity. The GPS, which was created about 20 years ago for global navigation, has also led to a revolution in Earth remote sensing. GPS signals are used routinely to make measurements of Earth orientation and polar motion, plate tectonic motion, neutral atmospheric temperature and water vapor profiles, and ionospheric electron density profiles for global monitoring. In addition, high-accuracy GPS navigation has enabled the support of many other remote sensing techniques, such as, for example, radar ocean altimetry. The next 5-10 years will see another revolution in global navigation signals, and thus in Earth remote sensing opportunities. The GPS system will be significantly upgraded, with more and stronger signals, more transmitted frequencies, and an improved infrastructure. Europe will also deploy its own navigation system called Galileo, which will be similar in capability to the upgraded GPS system. The resulting Global Navigation Satellite System (GNSS) will have over 50 transmitters, each with significant enhancements compared to today’s GPS satellites.
The GPS ocean altimetry concept was proposed in 1993 by Martín-Neira [1]. Since then, a number of aircraft experiments designed to study GPS ocean altimetry have been performed, (see e.g., [2]), with published precision and accuracy results. The GPS ocean scatterometry concept has also been proposed in [3] and tested in numerous aircraft experiments. Agreement between retrieved wind-speed and/or wind vector measurements obtained from the waveform tails with in situ buoy data as measured from aircraft (see, e.g., [4-6]) and from space [7] has been reported. Soil moisture measurements using GPS signal reflections have been performed from a stationary 300-m-tall NOAA Boulder Atmospheric Observatory (BAO) tower [8], and from aircraft [9].

Recently, in spite of weak signal levels after scattering off the ocean’s surface, dozens of GPS reflections have been observed [7] from a UK-DMC satellite modified with a moderate-gain down-looking antenna and a GPS receiver capable of down-linking many seconds of open-loop data. Much improved link budget and scatterometric measurement results are expected in the near future. Thus, the remote sensing application based on GPS signal reflection has been more challenging than the others listed above, all of which observe the signals directly. The upcoming GNSS revolution, with twice the number of transmitting satellites, more frequencies, and higher transmitted power levels, will make GNSS ocean altimetry a much more viable option for high-resolution ocean topography measurements. Of course, for orbital receivers of the GPS echoes, large high-gain antennas with electronic steering of beams would be necessary. At the same time, low-flying platforms, such as aircrafts and balloons, can use much simpler and inexpensive low-gain antennas.
2. Highlights of GPS reflectometry
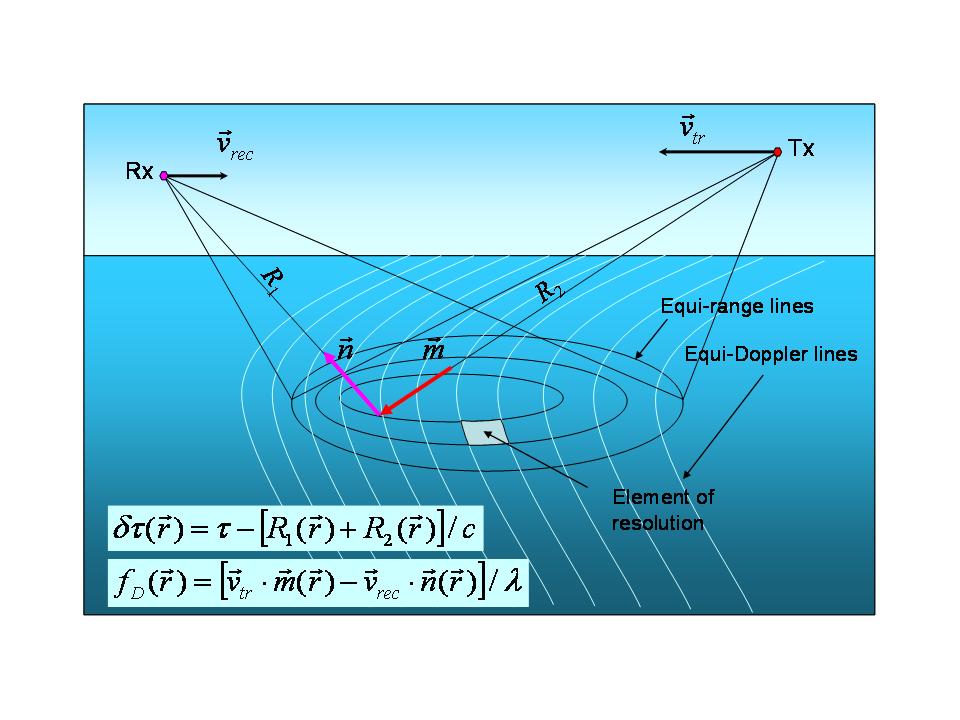
Figure 1.Geometry of bistatic scattering.
Because the source of the GPS signal and the receiver of reflected signals are separated by a significant distance, the configuration is called bistatic radar (Fig. 1). Measuring a delay between the direct signal and the signal reflected from the ocean surface and recalculating the temporal delay into the spatial intervals makes this radar an altimeter. In order to have absolute elevation measurements, an independent accurate measurement of the platform altitude is required, and it is available from differential GPS systems. Conventional altimeters are monostatic and can provide data only from a nadir and only along a single track. Multiple GPS satellites (from 5 to 10) make possible multiple tracks separated by a distance that depends on the altitude of the receiver of reflected signals that arrive at various angles. Measuring the peak power and/or the widening of the reflected waveform makes GPS bistatic radar a scatterometer; i.e., these measurements can convey information on dielectric properties and surface roughness and can be the basis for a remote sensing tool that complements radiometers and radars. The higher the receiver is the wider the swatch of surface tracks spreads. Since GPS satellites are changing their position in the sky slowly, the displacement of reflection spots is determined mostly by the movement of the receiver’s platform.
Because the bistatic altimetry concept is newer and more revolutionary, it has, until recently, significantly lagged behind other concepts in technology development. Due to the small size of the GPS receivers, this technology is perfectly suited for use onboard commercial aircrafts (analogously to the Aircraft Communication Addressing and Reporting System (ACARS)) or on unmanned aerial vehicles (UAVs).
3. Soil moisture measurements
In September 2003, the NOAA ETL, FIRST RF Corp., and the Colorado Center for Astrodynamics Research (CCAR) of the University of Colorado at Boulder, started a joint project which aimed at performing measurements both of GPS L-band (L1, λ = 19 cm) surface reflection and L-band microwave radiation emitted by the same land area. These measurements are needed to develop a novel technique for soil moisture remote sensing. The joint measurements using both instruments began in June 2004 using the 300-m-tall NOAA BAO tower near Erie, CO (40ş03’00.1”N, 105ş00’13.8”W). The NOAA researchers installed trusswork to the external carriage of the BAO tower for mounting the GPS reflection system and the L-band radiometer. Also, NOAA provided a soil moisture probing station with in situ probes (Campbell Scientific CS-615 time-domain reflectometers) installed at 5, 10, and 15 cm depth (Fig. 2).
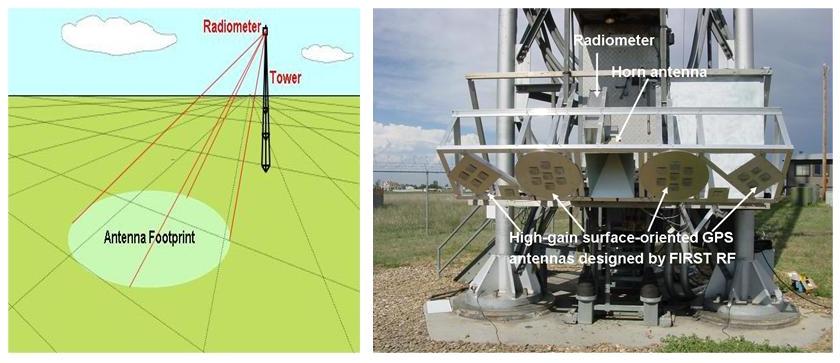
Figure 2. Geometry of the BAO tower soil moisture experiment, and the instrument installation at the external carriage.
A modified GPS navigation receiver mounted on the carriage of the BAO tower took measurements from May through July 2004 to receive both direct and reflected GPS signals. The GPS receiver tracked the direct line-of-sight satellites using a low-gain zenith-oriented right-hand circularly polarized (RHCP) antenna and recorded the cross-correlation function of the reflected signals using an alternating series of high-gain surface-oriented antennas designed by FIRST RF. In Figure 3, signal-to-noise ratios (SNR) of the reflected signal from four GPS satellites obtained along ground tracks with a four-element left-hand circularly polarized antenna are shown after a rain event, for eight days, from June 30 through July 7, respectively. Yellow points represent a SNR between 15-22.5 dB, and green points represent a n SNR greater than 22.5 dB. Plots for a SNR obtained for the satellites numbered PRN 7 and PRN 9 as a function of the elevation angle are shown in Fig. 4. These data clearly indicate a reduction of the reflected signal strength with a reduction of soil moisture.
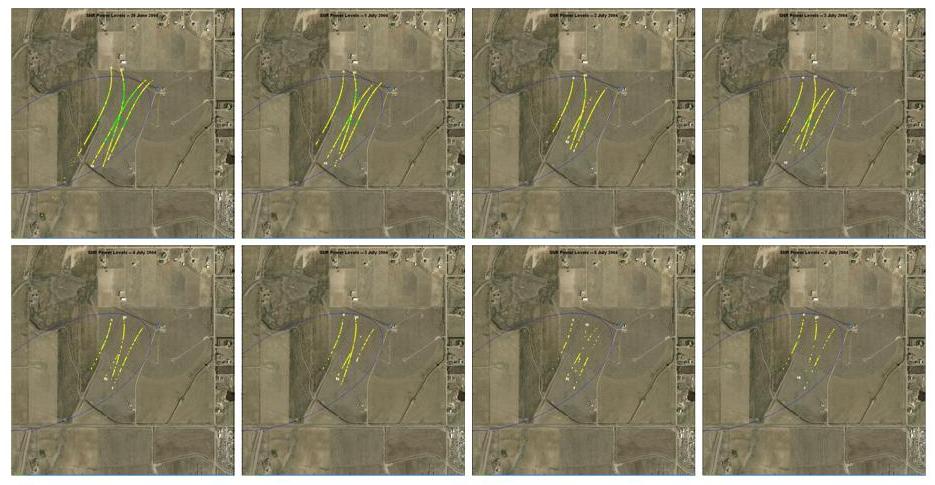
Figure 3. Ground tracks of GPS reflections. Intensity and color of tracks are indicative of soil moisture content.
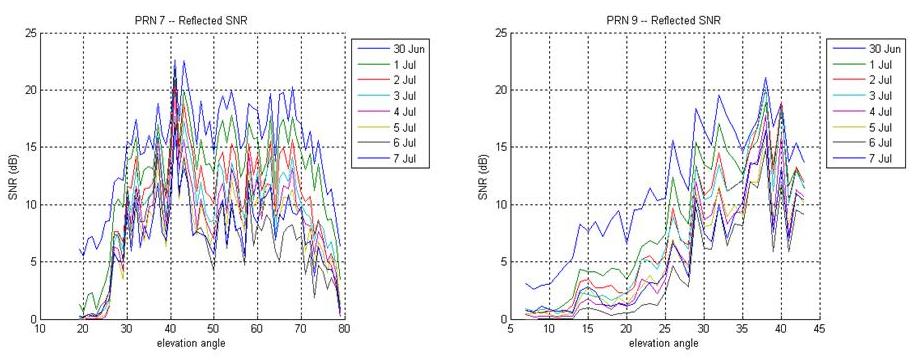
Figure 4. Signal-to-noise ratio of GPS reflections for several days as a function of the azimuth angle.
The GPS signal frequency is nearly optimal for soil moisture sensing, providing deeper penetration into the soil compared with commonly used remote sensing microwave bands. Assimilation of soil moisture observations are now being considered by the Office of Hydrologic Development as one way to improve streamflow forecasts for flooding in the short term, and for water supply and agricultural irrigation in the long term. Because of the sparsity of airborne soil moisture forecasts, the development of this technique will greatly improve the availability of observations.
4. Near-surface winds and altimetry measurements
Signals acquired by GPS bistatic radar and by a conventional radar scatterometer are generated by different mechanisms. Scatterometers rely on Bragg scattering from very short, capillary waves, the spectra of which are very sensitive to changes in wind speed and direction. GPS reflections are caused by large and intermediate sea-surface slopes, which relate to wind vector indirectly and depend also on wave age (fetch), which needs to be estimated independently. An example from [4] of the GPS-derived wind vector estimates at the end of the NOAA P-3 flight to Hurricane Keith in the Gulf of Mexico on 1 Oct 2000 overlaid on QuikSCAT wind field measurements is shown in Fig. 5.
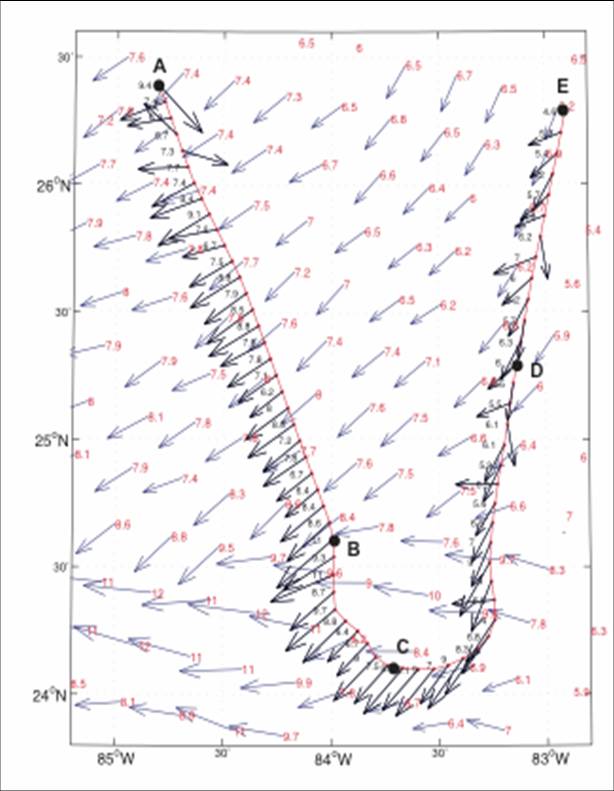
Figure 5. GPS-derived wind vector estimates at the end of the NOAA P-3 flight to Hurricane Keith on 1 Oct 2000 overlaid on QuikSCAT wind field measurements [4].
The GPS-based ocean reflection experiments performed to date from airplanes and fixed sites have demonstrated precision and spatial resolution suitable for altimetric applications that require higher spatial resolutions and more frequent repeat times than are feasible with the current generation of radar altimeter satellites. Such applications include measurements of the storm surge height during a hurricane season, monitoring of the mesoscale eddies, and, possibly, tsunami wave propagation and dynamics. However, more work is needed to fully characterize the measurement error, particularly to quantify the impact of the wind waves and tropospheric delays on the ultimate attainable accuracy. To prove the feasibility of measuring storm surge heights we proposed testing the novel technique during the hurricane season of 2006 using a NOAA P-3 aircraft to measure a storm surge in the coastal area (Fig. 6).
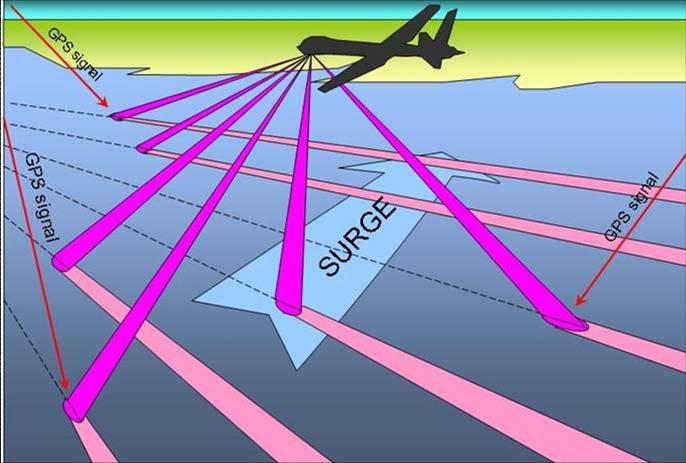
Figure 6. Geometry of GPS reflection altimetry for storm surge measurements.
In September 2006 ESRL/Weather and Climate Physics Branch together with First RF Corp. installed their GPS bistatic radar-altimeter on a NOAA P3 aircraft seeking to assess the possibility of storm surge measurements [10]. While there were no landfalling hurricanes in 2006, altimetric data show that the storm surge can be measured to an accuracy of ~ 1 m over 1 s of the flight time, or ~ 0.1 m over 1 min of the flight time (Fig. 7).
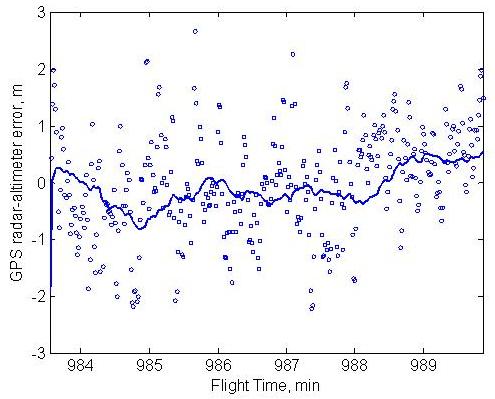
Figure 7. GPS altimetric accuracy estimated from the data obtained during the September 2006 flight on the NOAA P-3 aircraft.
References
1. Martín-Neira, M., 1993, A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry, ESA J., 17, 331-335.
2. Lowe, S.T., C. Zuffada, Y. Chao, P. Kroger, L. Young, and J. LaBrecque, 2002, Five-cm-precision aircraft ocean altimetry using GPS reflections, Geophys. Res. Lett., 29, 15-15.
4. Komjathy, A., V. Zavorotny, P. Axelrad, G. Born, and J. Garrison, 2000, GPS signal scattering from sea surface: Wind speed retrieval using experimental data and theoretical model, Remote Sens. Environ., 73, 162-174.
7. Gleason, S. S. Hoodgart, Y. Sun, C. Gommenginger, S. Mackin, M. Adjrad, and M. Unwin, 2005, Detection and processing of bistatically reflected GPS signals from low Earth orbit for the purpose of ocean remote sensing, IEEE Trans. Geosci. Remote Sens., 43, 1229-1241.
9. Masters, D., P. Axelrad, and S. Katzberg, 2004, Initial results of land-reflected GPS bistatic radar measurements in SMEX’02, Remote Sens. Environ., 92, 507-520.
10. Wilmhoff B., F. Lalezari, V. Zavorotny, and E. Walsh, GPS ocean altimetry from aircraft using P(Y) code signal, In Proc. Int. Geosci. Remote Sens. Symp., (IGARSS’07), Barcelona, Spain, July 23 – 27, 2007.